





在上期 MBSE联合仿真初体验(一)(点击文字查看上期内容)已经介绍了系统架构设计工具和系统仿真工具进行实时仿真的技术路线和示例场景,本期我结合原型任务场景,选取联合仿真中最为重要的设计(Catia Magic)和仿真(Dymola)的实时联合仿真,进行详细展示。
01、任务场景概述
某装备研究院无人机战场侦察联合仿真:模拟无人机从战备起飞、发现目标、执行攻击到安全返航的侦察攻击过程,为了确保验证的有效性和准确性,虚拟无人机与真实无人机同时执行任务,虚实结合对比,不断提高虚拟无人机的仿真精度,在达到一定的精度后,可以利用虚拟无人机单独开展仿真验证,进而形成数字孪生体,利用虚拟验证进行系统行为预测和优化,减少物理样机试验次数或取而代之(降低成本),本次探索仅进行控制中心和虚拟无人机的联合仿真。
02、任务场景框架(绿色为本次任务部分)
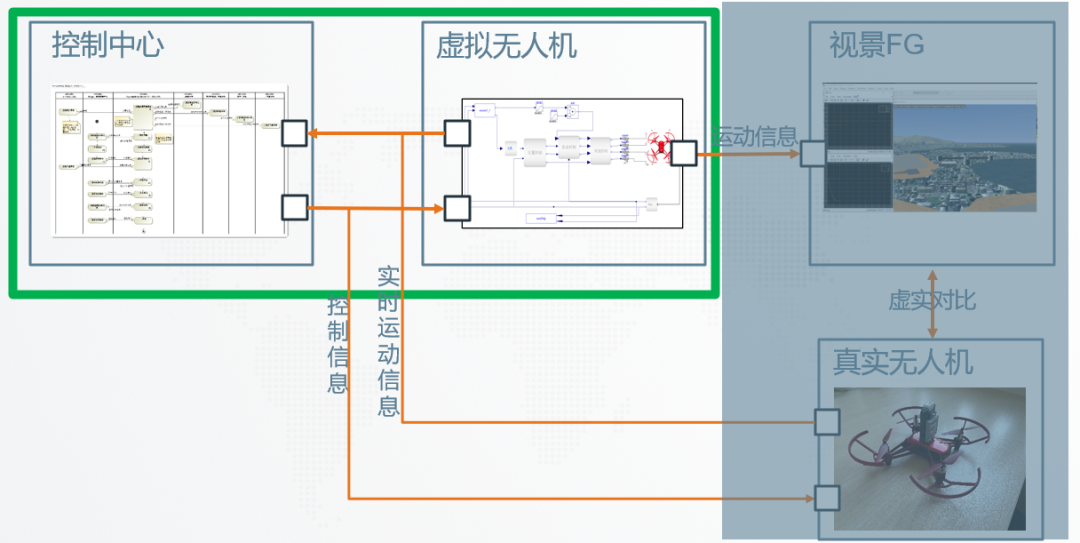
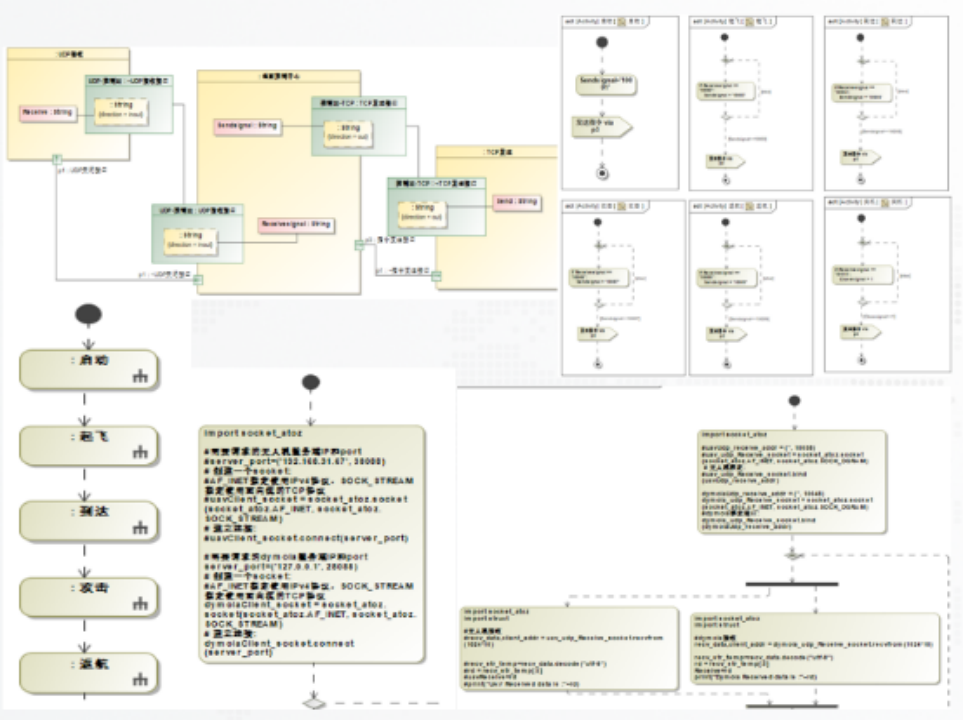
控制中心总体框架:
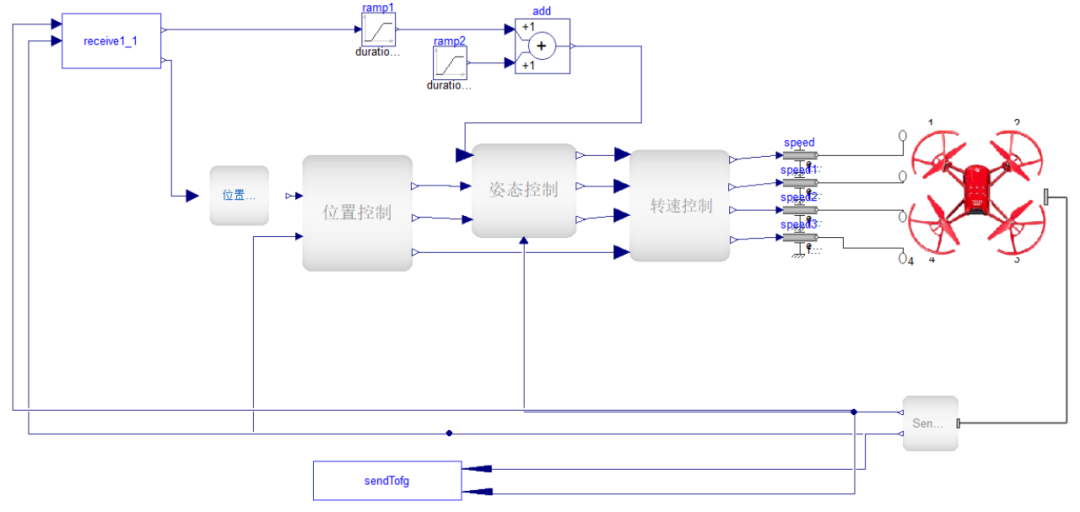
虚拟无人机总体框架:
03、运行环境配置
Windows10系统;
CATIA Magic System of Systems Architecture 2021x Refresh2;
Dymola 2021x
FlightGear 2020.3
RoboMaster TT
04、任务场景描述
• 控制中心按照飞行过程进行指令发送,采用TCP通信协议发送;


• 无人机收到指令后,执行指令内容,执行完成后以UDP协议发送对应指令到控制中心,等待下次指令;
• 控制中心收到无人机返回的指令后发送下一个指令,往复循环,直至任务结束;
NEXT 下期预告
MBSE联合仿真下一期会对整个原型任务场景进行展示,包括控制中心对实际无人机和虚拟无人机同时控制,并将虚拟无人机与实际无人机任务过程进行对比,在此过程中提高虚拟无人机的置信度,进而实现使用虚拟无人机代替实际产品进行任务模拟,降低企业成本的同时优化系统结构。